|
I am a Masters in Robotics Student at the Robotics Insitute at Carnegie Mellon University where I am advised by Prof. Katia Sycara. I currently work in the area of Human-Agent Teaming and Multi-Agent Reinforcement Learning. I completed my undergraduate studies in Mechanical Engineering from the Indian Institute of Technology Delhi . I am looking for positions in the industry in the area of Machine Learning and Computer Vision starting Summer' 21/Fall' 21.
|
|
|
I am interested in Deep Reinforcement Learning, Human-Robot Interaction and Computer Vision. My long-term research goal is to design autonomous robots with cognitive capabilities that can interact with humans naturally. |
|
|
Rohit Jena, Siddharth Agrawal, Katia Sycara NeurIPS 2020, Deep Reinforcement Learning Workshop (NeurIPS Talk) Generative Adversarial Imitation Learning suffers from the fundamental problem of reward bias stemming from the choice of reward functions used in the algorithm. We provide a theoretical sketch of why existing reward functions would fail in imitation learning scenarios in task based environments with multiple terminal states. We also propose a new reward function for GAIL which outperforms existing GAIL methods on task based environments with single and multiple terminal states and effectively overcomes both survival and termination bias. |
|
Ni*, Agrawal*, Li*, Raja, Gui, Jia, Lewis, Hughues, Sycara The AAAI 2021 Workshop on Plan, Activity, and Intent Recognition In this paper, we propose a novel adaptive agent architecture in human-model-free setting on a two-player cooperative game, namely Team Space Fortress (TSF). |
|
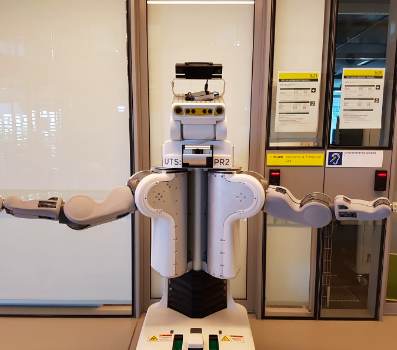
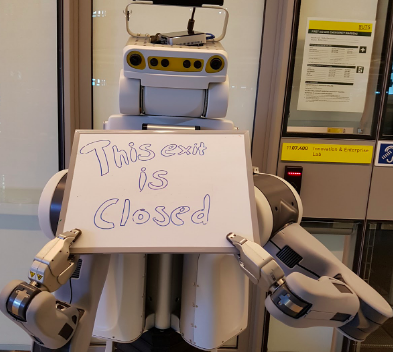
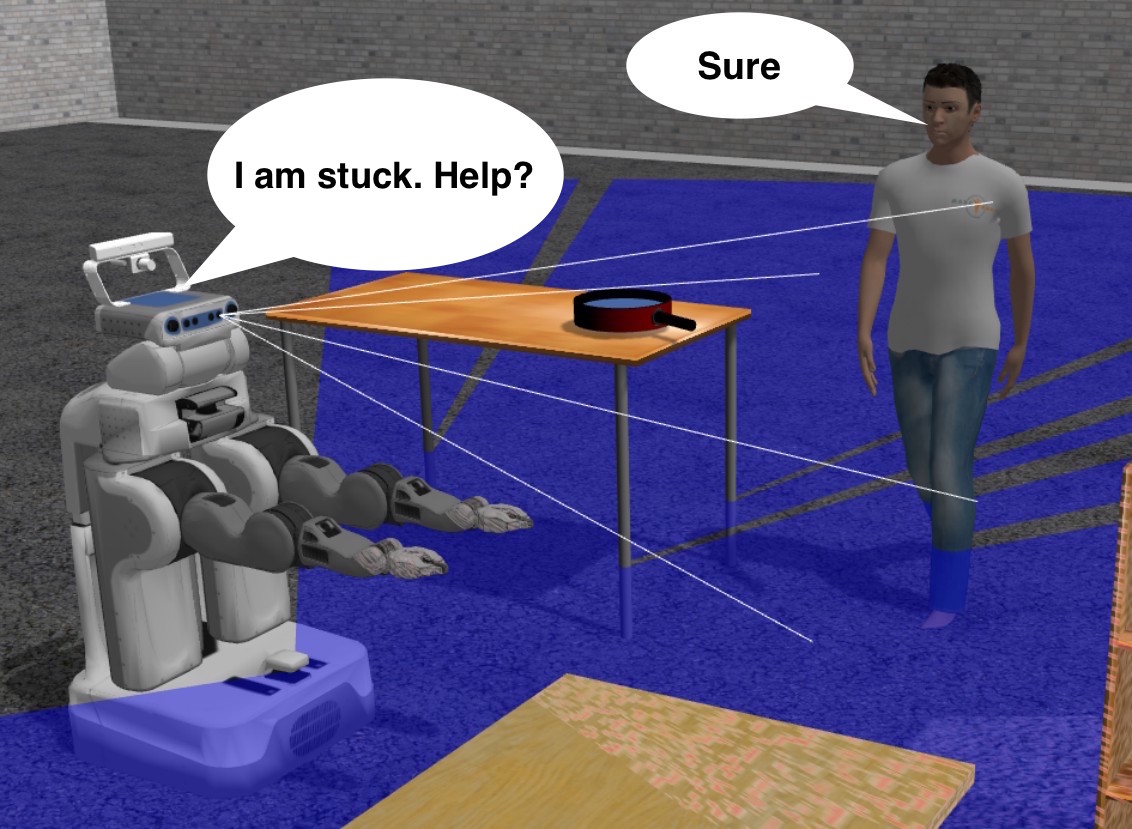
Siddharth Agrawal, Mary-Anne Williams (Long Version) 27th IEEE International Symposium on Robot and Human Interactive Communication (Short Version)ACM/IEEE International Conference on Human-Robot Interaction, 2017 In this paper, we present the results of a Human-Robot Interaction field experiment conducted using a PR2 robot to explore key factors involved in obedience of humans to social robots. This paper focuses on studying how the human degree of obedience to a robot's instructions is related to the perceived aggression and authority of the robot's behavior. We implemented several social cues to exhibit and convey both authority and aggressiveness in the robot's behavior. |
|
Siddharth Agrawal, Holly Yanco ACM/IEEE International Conference on Human-Robot Interaction, 2018 In this paper, we explore different methodologies of giving feedback and study their impact on trust, control allocation and workload in setting of human-robot collaboration. |
|
|
Siddharth Agrawal, Tejas Zodage Robot Localisation and Mapping Course Project, CMU Fall' 20 Performance of deep learning based PCR methods still remains unsatisfactory in presence of sensor noise and outliers which limits their application to real world scenarios. In this work, we extend an existing deep learning based point cloud registration technique to make it robust to sensor noise and outliers in the input. We demonstrate how the embedding space of a pretrained model can be leveraged to filter out outliers in the input point clouds. |
 
|
Siddharth Agrawal, Tejus Gupta, Elias Joseph Machine Learning Course Project, CMU Fall' 19 We introduce a new method for doing genre transfer. We use an encoder-decoder model along with an adversarial classifier to disentangle genre-agnostic attributes from the genre-specific features in the latent representation of our music files. |
|
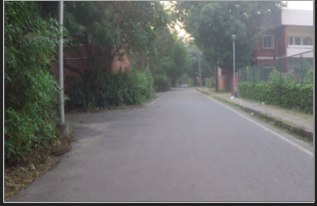
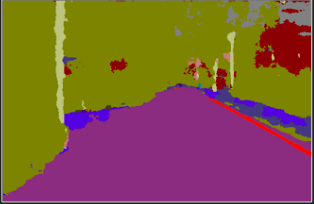
Siddharth Agrawal, Amogh Gupta, Shrey Pandey, (Done under the supervision of Dr. Sunil Jha) Undergraduate Thesis, IIT Delhi I worked on Perception and Motion Planning for the Mahindra Driverless Car. This work was also a part of my senior thesis at IIT Delhi. |
|
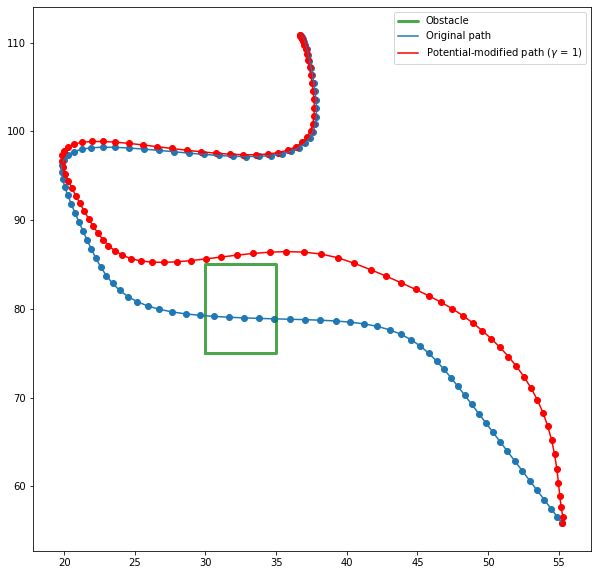
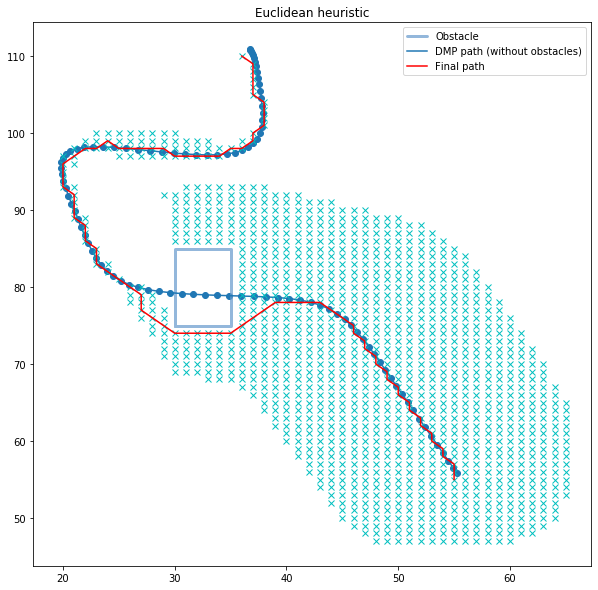
Siddharth Agrawal, under the supervision of Dr. Kris Hauser Internship Project, Duke University Spring' 19 Learning from Demonstration is useful for learning complex skills, however, is not capable of adapting to changes in the workspace. Therefore, we design an Incremental PRM Planner that uses a novel cost function based on UCB to adapt learnt Motion Primitives in diverse workspaces. |
|
Design and Code from Jon Barron's website |